Image extraction from: Adaptive hierarchical origami-based metastructures, DOI: 10.1038/s41467-024-50497-5
La Universidad Estatal de Carolina del Norte Desarrolla un Robot Cambiante de Forma Inspirado en el Origami
Tiempo de lectura: 3 min.
Publicado por primera vez el: Jul 31, 2024
Actualizado 2 veces desde su publicación
-
![Kiara Fabbri]()
-
![El equipo de localización y traducción]()
Traducido por El equipo de localización y traducción Servicios de localización y traducción

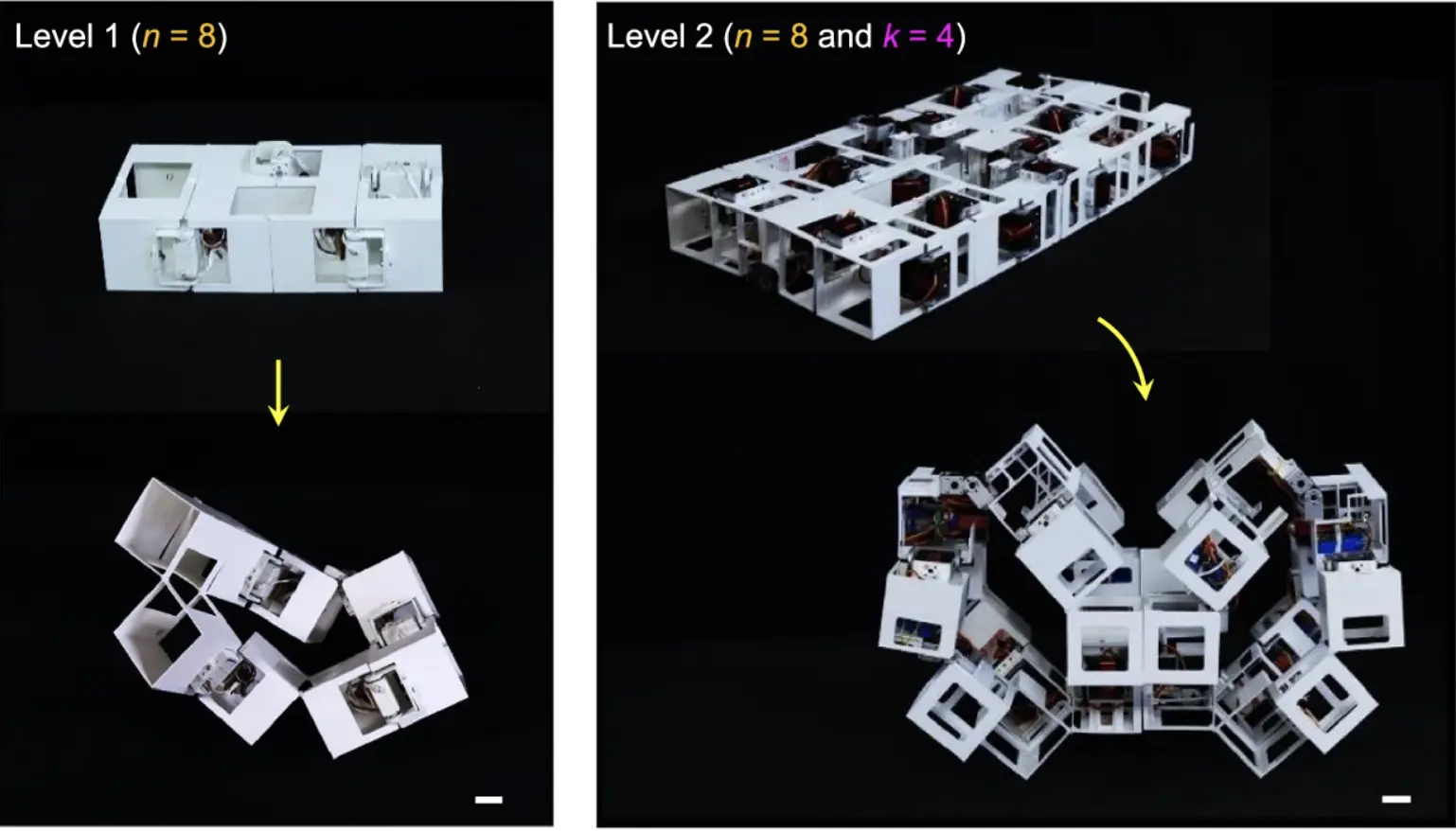
Un equipo de investigadores de la Universidad Estatal de Carolina del Norte ha creado una estructura de cubo de plástico capaz de transformarse en más de 1,000 configuraciones utilizando solo tres motores. Este avance podría conducir al desarrollo de robots versátiles para diversas aplicaciones, particularmente en arquitectura y exploración espacial.
En su artículo de investigación, el equipo explica cómo utilizaron una impresora 3D para ensamblar 36 cubos de plástico huecos conectados por bisagras giratorias. Algunas bisagras fueron fijadas con pasadores de metal, mientras que otras estaban motorizadas. Esta configuración permitió que la estructura se transformara en una variedad de formas, incluyendo túneles, puentes y estructuras de varios pisos.
Al cambiar de forma, los robots transformadores pueden moverse en todas direcciones y cargar pesos de hasta tres veces su propio peso, todo sin la necesidad de tener pies.
Los robots cambiaformas pueden adaptarse a diferentes tareas y entornos, lo que los hace potencialmente útiles para aplicaciones multifuncionales en campos como la exploración espacial. La capacidad de los robots para cargar cargas y cambiar de forma según sea necesario podría revolucionar el diseño de sistemas artificiales.
“Creemos que estos pueden ser utilizados como robots espaciales desplegables y configurables y como hábitats”,afirmó Antonio Di Lallo, uno de los primeros autores del artículo. “Es modular, por lo que puedes enviarlo al espacio plano y montarlo como un refugio o como un hábitat, y luego desmontarlo”.
Aunque la tecnología tiene un gran potencial, existen algunas limitaciones. La capacidad de carga de las estructuras, especialmente a escalas más grandes, necesita mejoras. Los prototipos actuales tienen limitaciones en su capacidad para soportar un peso significativo debido a los materiales utilizados para las bisagras, que sacrifican la resistencia en favor de la flexibilidad. Además, los investigadores señalaron desafíos para aprovechar plenamente las capacidades de cambio de forma para diversas locomociones robóticas en entornos no estructurados.
La investigación abre nuevas vías para futuras exploraciones. “Queremos hacer una estructura más robusta que pueda soportar cargas más grandes”, afirmó Yanbin Li, uno de los autores correspondientes del artículo, en NC State University News. “Si queremos una forma de coche, por ejemplo, ¿cómo diseñamos la primera estructura que puede transformarse en una forma de coche? También queremos probar nuestras estructuras con aplicaciones reales como los robots espaciales.”
El estudio, publicado en Nature Communications, fue respaldado por becas de la National Science Foundation. Este enfoque innovador para el diseño de robots podría allanar el camino para nuevos avances en sistemas artificiales, haciéndolos más adaptables y funcionales para diversas aplicaciones.

 Artículos más recientes
Artículos más recientes 


Dejar un comentario
Cancelar